- Могут ли у робота быть эмоции?
- Каким должен быть робот?
- Научные исследования
- Первый эксперимент
- Вторая группа
- Каков же результат?
- Выводы
- Что насчет «чтения» эмоций в состоянии стресса?
- Результаты второго исследования
- Эволюция интеллекта: зачем роботам эмоции
- Введение
- Новое определение
- Индивидуализация
- Интеллект на пути к разуму
- Робопсихология как она есть
- Благодарности и приглашения
Могут ли у робота быть эмоции?

Уже в ближайшее время социальные роботы и роботы-помощники станут важной частью жизни людей. Они могут оказаться у вас дома, в больницах и в школах, они будут помогать с заботой о детях, о престарелых, будут ассистировать при реабилитации после болезни или травмы, а также в реализации любой другой формы помощи.
Каким должен быть робот?

Но как много человечество знает о психологии взаимодействия с роботами? Как должен выглядеть подобный робот? Как он должен передвигаться и реагировать на людей? На какую информацию он должен реагировать? Должен ли робот «проявлять» эмоции и отвечать на проявление эмоций человека? Насколько похожим на человека должен быть такой робот? Насколько инновационными могут быть научные идеи при разработке подобных роботов, способных быть отзывчивыми помощниками и оказывать необходимую и надежную поддержку, включая моменты особого стресса и напряжения, в которых может оказаться человек?
Научные исследования
Пришло время взглянуть на два отдельных научных исследования, которые рассматривают то, как люди понимают эмоции у роботов и реагируют на них. В каждом наборе экспериментов очень детально изучались некоторые конкретные аспекты того, как роботы могут выглядеть или двигаться. Междисциплинарная международная команда ученых из Израиля и США занялась первым исследованием, второе же исследование было проведено в Америке при содействии экспертов из сфер роботехники, виртуальной реальности, человеческого фактора и человека как такового. Робот по имени Трэвис не выглядит как человек. Трэвис имеет небольшой размер, черты, отдаленно напоминающие какое-либо существо, большие уши, но при этом у него нет ни глаз, ни носа, ни рта. Его высота составляет около 28 сантиметров, и, когда вы ставите его на стол, голова Трэвиса оказывается примерно на уровне с лицом сидящего перед столом человека. Робот может кивать, раскачиваться или отворачиваться. У Трэвиса имеется часть, которую можно трактовать как вытянутую ногу, а также у него имеется вытянутая рука, в которой он держит смартфон, благодаря которому он работает.
Первый эксперимент

Когда участники (102 студента) прибыли в лабораторию, им было сказано, что они принимают участие в тестировании нового алгоритма понимания речи для роботов, и в рамках этого тестирования робот будет пытаться понять, что человек ему говорит. Участников попросили рассказать роботу о проблеме, заботе или стрессовой ситуации, с которой они столкнулись в недавнее время, например, о недавней ссоре с другом или членом семьи или о серьезной болезни. Их попросили также описать их проблему в трех частях, а также говорить, когда они заканчивают рассказывать каждую часть, после чего робот будет отвечать им с помощью смартфона. Однако участники не знали, что их случайным образом разделили на две группы. В «реагирующей» группе Трэвис находился лицом к участнику, когда тот рассказывал о своей проблеме, периодически слегка кивая головой и покачиваясь. Также в конце каждой из трех частей на экране смартфона демонстрировалось сообщение из готового набора, такое как «Я понимаю, через что ты проходишь» или «Тебе, наверное, пришлось нелегко». В действительности Трэвис даже не выбирал эти сообщения. Один из ученых слушал беседу и выбирал подходящее сообщение в нужное время.
Вторая группа
Участники «нереагирующей» группы столкнулись с совершенно другим Трэвисом. Он не кивал и не качался, а текст, который отображался на экране смартфона после завершения каждой из частей рассказа, просто сообщал участнику, чтобы он продолжал говорить. После завершения «беседы» участников попросили оценить робота по ряду критериев в форме ответов на несколько простых вопросов о том, насколько отзывчивым был Трэвис. Например, их просили по шкале от одного до десяти оценить, насколько они согласны с фразами «Робот понимал, что я думаю и чувствую» или «Робот действительно меня слышал». Другие вопросы также уточняли, насколько общительным и компетентным был Трэвис.
Каков же результат?

Также видеозаписи общения каждого из участников с Трэвисом были оценены независимыми судьями, которые не знали о том, в каких условиях находится каждый участник. Анализ беседы показал, что участники, которые общались с отзывчивым роботом, не рассказали больше о сути своей проблемы, чем участники, которые общались с неотзывчивым роботом. Однако отзывчивый Трэвис получил гораздо более высокую оценку по шкале общительности и компетентности (его описывали как способного, надежного и знающего). Что еще важнее, когда независимые судьи просматривали и оценивали видеозаписи, они заметили, что те участники, которые общались с отзывчивым Трэвисом, сами были гораздо более отзывчивыми по отношению к роботу и шли на открытый разговор. Они чаще наклонялись вперед к Трэвису, улыбались, поддерживали с ним зрительный контакт. Точно то же самое было обнаружено и в последующем исследовании, в рамках которого участников просили рассказать не отрицательное, а положительное событие в их жизни.
Выводы
Таким образом, даже когда робот не напоминает человека, люди быстро ухватывают даже самые слабые сигналы отзывчивости на их собственные слова и действия. Соответственно, дизайн робота не должен иметь большое количество различных деталей, жестов и вариантов действий, чтобы повысить человеческую оценку его отзывчивости и социальности. В результате можно сказать, что это открывает гораздо больше возможностей для того, чтобы разрабатывать функциональных роботов. Но что если человеку приходится столкнуться с роботом непосредственно тогда, когда он находится в состоянии стресса? Не когда он просто вспоминает что-то плохое, а переживает реальный физический и когнитивный стресс. Сможет ли стресс помешать человеку «прочитать» невербальную эмоциональную экспрессию робота?
Что насчет «чтения» эмоций в состоянии стресса?
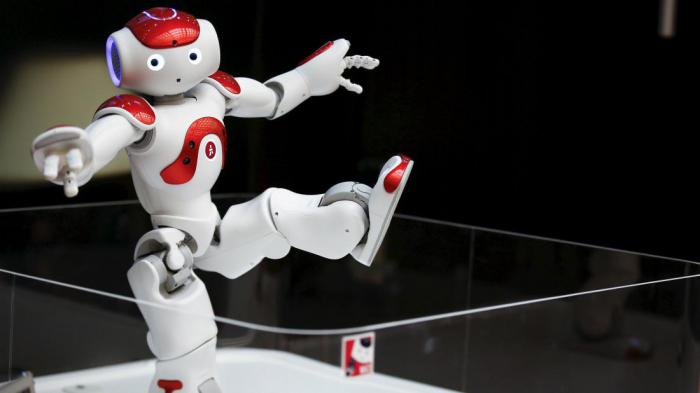
И хотя исследования продемонстрировали, что люди способны читать эмоциональные выражения у роботов в повседневных нейтральных условиях, второе исследование, о котором пойдет речь, стало первым в истории, изучившим реакцию человека на робота непосредственно во время сильного стресса. В рамках исследования были симулированы стрессовые условия. Ученые заставляли участников погружать руку в ледяную воду на определенные промежутки времени, при этом подвергая их еще большему стрессу, заставляя решать сложные математические задания в уме. После этого их просили оценить эмоционально-экспрессивные или статически позы 60-сантиметрового робота-гуманоида Нао. Выражение лица и глаз Нао оставались неизменными, в то время как тело робота занимало одну из 25 различных поз, которые демонстрировали либо положительные, либо отрицательные эмоции.
Результаты второго исследования
Повлиял ли стресс на то, как участники могли «читать» позы робота? Второй группе участников повезло больше, они погружали руку в теплую воду и в уме выполняли простейшие арифметические примеры. Однако оказалось, что стресс оказывает крайне малое влияние на то, как люди воспринимают эмоции, за исключением тех поз, которые демонстрировали сильное оживление или возбуждение. Когда участники сами были подвержены стрессу, они воспринимали негативные позы робота как более негативные и менее оживленные или возбужденные. Другими словами, стресс немного сместил восприятие эмоций робота, поэтому негатив казался еще большим негативом, а позитив – меньшим позитивом.
Источник
Эволюция интеллекта: зачем роботам эмоции
Эмоции и интеллект, физики и лирики. Сколько уже времени длится противопоставление этих категорий?
Казалось бы, всем известно, что эмоции мешают интеллекту и мы ценим в людях хладнокровие, восхищаемся их умением не поддаться эмоциям и поступить рационально. С другой стороны, отсутствие эмоций тоже нам не очень-то по душе. Вполне возможно, что, не всем нравятся педанты и сухари и, когда они проявляют эмоции, нам, бывает, кажется, что это и есть сама человечность.
Что же такое эмоции? Эксклюзивное ли это качество человека или ими обладают еще и животные? И, наконец, нужны ли эмоции роботам и могут ли они у них быть вообще?
Всех, кто интересуются такими вопросами и любит пофилософствовать, добро пожаловать под кат.
Введение
Эта статья является продолжением статьи, опубликованной ранее под названием
Эволюция интеллекта: начало. В ней излагается довольно простая идея, что если мы предположим, что интеллект не появился единомоментно, а прошел эволюционный путь от крайне простых форм к своей современной модели последнего поколения (интеллекта человека), то традиционное определение интеллекта, заточенное под человека, явно потребует пересмотра в сторону большей универсальности. Кроме этого, в статье для удобства рассуждений введена классификация эволюционных уровней интеллекта, как неких аналогов поколений техники.
Новое определение
Интеллект — это наблюдаемая способность к решению задач, поставленных перед его носителем
В силу своей универсальности такое определение позволяет оторваться от привычного представления об интеллекте, как об эксклюзивной способности человека и посмотреть на окружающий мир с менее антропоцентричных позиций.
Кроме этого, в определении делается акцент на необходимости наблюдения за этой способностью. Мы пока не умеем измерять потенциал интеллекта. В фантастических произведениях зачастую существует некий прибор, который выдает сразу цифру интеллектуального потенциала. Однако, в реальном мире, чтобы измерить какой-то аспект интеллекта мы используем экзамены и тесты, состоящие, собственно, из отдельных задач, и в ходе теста наблюдаем и измеряем баллами оценки эту самую способность к их решению.
Индивидуализация
Главной характеристикой эволюционного уровня интеллекта (как аналога поколения в технике) была выбрана индивидуализация. Судя по комментариям к первой части статьи этот выбор вызвал недоумение.
А ведь все мы хорошо знакомы с индивидуализацией. Когда мы выбираем одежду, такую, не как у всех, украшаем фенечками себя или свой автомобиль, вносим уютное своеобразие в убранство своего стандартизованного жилища — все это проявление нашей индивидуальности, проявления свободы нашего внутреннего мира.

В сумме множество индивидуальностей дают богатство. Богатство мнений, идей, решений, точек зрения, самовыражений и, в итоге, интеллектуальное богатство нас, как народа и в целом биологического вида. И, наоборот, процессы унификации людей, стремление «стричь под одну гребенку», «мерить одной меркой» — современные синонимы оболванивания, малоинтеллектуальности.
Но быть ли уникальной личностью или унифицировать себя, быть собой или быть как все в наше время пока еще наш личный выбор. По крайней мере, мы не ограничены в этом конструктивно и наш интеллект, интеллект человека, в своем потенциале предлагает нам бесконечное индивидуальное разнообразие.
Технически, на другом конце шкалы индивидуализации находятся алгоритмы. Разные компьютеры с одной и той же программой будут действовать всегда одинаковым образом. И, именно в силу своего конструктива, интеллект такого класса обладает нулевым индивидуальным разнообразием или нулевым уровнем индивидуализации.
Интеллект на пути к разуму
Попробуем разобраться, какие же эволюционные вехи находятся между нулевой и бесконечной индивидуализацией?
Первый шаг — когда каждый индивид, носитель интеллекта решает задачи каким-то различным путем, но пути этих решений [технически] неизменны в течение жизни индивида. Если добавить сюда наследование и отбор, то получится вполне ясный механизм эволюции, когда неудачные и неэффективные пути решений будут отсеиваться, а удачные и эффективные — закрепляться. В природе это реализуется через безусловные рефлексы. Назовем это интеллектом I уровня индивидуализации.
Второй шаг — это когда индивидуальный носитель интеллекта имеет [техническую] способность изменять пути решения задач. Теперь уже сам индивид в ходе своей жизни может выбирать более удачные пути решений и отметать неэффективные. В природе это реализуется через условные рефлексы. Это будет интеллект II уровня индивидуализации.
Третий шаг — когда индивидуальный носитель интеллекта имеет [техническую] способность к согласованным коллективным действиям. Согласование действий требует выработки конвенциональной коммуникации. При этом канал коммуникации может быть весьма различен: это и жесты, и звуки, и запахи, и визуальные сигналы. Принципиальной характеристикой здесь является конвенциональность, то есть значения сигналов не предопределено жестко алгоритмами, а является результатом соглашения, локального для группы индивидов. Важной бонус этого уровня — потенциальная способность к межвидовой коммуникации. Это уже интеллект III уровня индивидуализации.
Четвертый шаг — это появление абстрактно-логического мышления. Как известно, мышление базируется на способности к коммуникации, так как абстрактно-логически мы думаем словами, то есть коммуникативными единицами, которые становятся смысловыми. Это интеллект IV уровня индивидуализации, или интеллект человека. Этот уровень интеллекта традиционно называют разумом, а самого человека как вид — разумным.
Как мы видим, каждый шаг принципиально расширяет степень индивидуализации, постепенно изменяя потенциальную способность значения этой характеристики варьироваться от нуля до бесконечности.
Робопсихология как она есть
Благодаря предложенной выше классификации уровня интеллекта мы можем более четко представить как пути усовершенствования роботов, так и их последствия.
Если эволюция интеллекта — это путь от меньшей к большей индивидуализации, то это означает неизбежность появления роботов с индивидуальным поведением, а значит неизбежно возникнет вопрос, как это поведение контролировать и регулировать.
Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред. (с) «3 закона робототехники», А. Азимов, 1942
Как мы видим из даты рождения цитируемого произведения, вопрос контроля поведения роботов интересен человечеству уже не первое десятилетие. В данном случае признанный классик фантастики пошел по традиционному пути юриспруденции и сам же в своих произведениях показал бесперспективность этого варианта ввиду легкости изменения его трактовок.
Закон, что дышло, куда повернул, туда и вышло (с) Народная мудрость
Но если вариант ограничений с помощью юридических формулировок бесперспективен, то как же решить задачу контроля и регулирования поведения робота? Давайте посмотрим, как с этой задачей справилась природа. Ведь начиная с II уровня индивидуализации живые существа получили техническую возможность некоторой свободы своего поведения. А как быть в таком случае с интересами собственной безопасности, выживанием и процветанием своего вида?
Природа решила эту задачу весьма интересным способом. Жестко запрограммированными остались стратегические задачи индивида, а тактические были переданы на откуп изменчивому индивидуальному поведению. Посредником между тактикой и стратегией стали эмоции. Каждый живой индивид начиная со II уровня индивидуализации получил способность испытывать положительные эмоции, когда его поведение соответствовало стратегическим задачам и негативные, когда противоречило. Причем эмоции могут как появляться постфактум, после принятого решения, например, как радость и ликование от удачного спасения в минуту опасности, так и предварять и побуждать к решению, например, беспокойство в период гона.
Любовь сушит человека. Бык мычит от страсти. Петух не находит себе места. Предводитель дворянства теряет аппетит. (с) 12 Стульев. Ильф и Петров.
Можно перенести это решение в область робототехники и аналогичным образом контролировать поведение роботов через побуждение эмоциями к действию и эмоциональной наградой за правильное действие и наказанием за неправильное? Наверно да. Как именно? Об этом пойдет речь в продолжении.
Вполне возможно, что если робот будет испытывать эмоции, его поведение будет нам куда ближе и понятнее и мы сможем более легко включить роботов в сообщество людей.
В следующей статье «Интуиция» можно ознакомиться, как с позиции теории эволюции интеллекта рассматриваются такие феномены, как интуиция и предвзятое отношение.
Благодарности и приглашения
Автор благодарит профессора Н.В. Хамитова за неоценимую помощь, оказанную в ходе разработки данной теории.
Автор приглашает всех желающих, а в особенности эволюционных биологов, поучаствовать в обсуждении, а может, увлекшись, и присоединиться к работе над теорией.
Источник