- Могут ли у робота быть эмоции?
- Каким должен быть робот?
- Научные исследования
- Первый эксперимент
- Вторая группа
- Каков же результат?
- Выводы
- Что насчет «чтения» эмоций в состоянии стресса?
- Результаты второго исследования
- Смогут ли роботы почувствовать собственное «я»?
- Физическое «я»
- Полное «я»
- Почему роботы никогда не боятся: чувства искусственного интеллекта
- Нужно ли чувство страха искусственному интеллекту? Обладают ли им современные роботы? Как страх будет влиять на действия роботов? Ответим на все эти вопросы сегодня…
Могут ли у робота быть эмоции?

Уже в ближайшее время социальные роботы и роботы-помощники станут важной частью жизни людей. Они могут оказаться у вас дома, в больницах и в школах, они будут помогать с заботой о детях, о престарелых, будут ассистировать при реабилитации после болезни или травмы, а также в реализации любой другой формы помощи.
Каким должен быть робот?

Но как много человечество знает о психологии взаимодействия с роботами? Как должен выглядеть подобный робот? Как он должен передвигаться и реагировать на людей? На какую информацию он должен реагировать? Должен ли робот «проявлять» эмоции и отвечать на проявление эмоций человека? Насколько похожим на человека должен быть такой робот? Насколько инновационными могут быть научные идеи при разработке подобных роботов, способных быть отзывчивыми помощниками и оказывать необходимую и надежную поддержку, включая моменты особого стресса и напряжения, в которых может оказаться человек?
Научные исследования
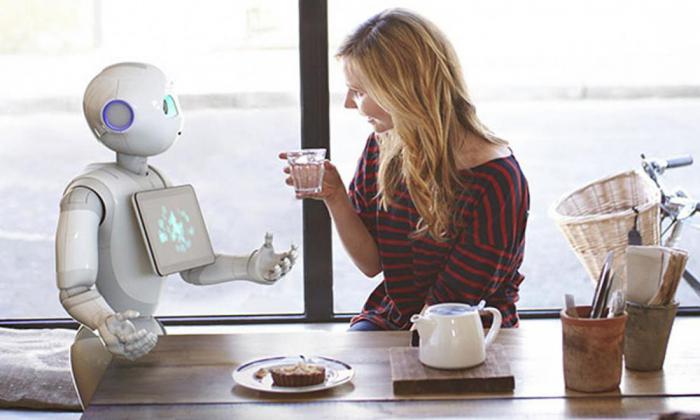
Пришло время взглянуть на два отдельных научных исследования, которые рассматривают то, как люди понимают эмоции у роботов и реагируют на них. В каждом наборе экспериментов очень детально изучались некоторые конкретные аспекты того, как роботы могут выглядеть или двигаться. Междисциплинарная международная команда ученых из Израиля и США занялась первым исследованием, второе же исследование было проведено в Америке при содействии экспертов из сфер роботехники, виртуальной реальности, человеческого фактора и человека как такового. Робот по имени Трэвис не выглядит как человек. Трэвис имеет небольшой размер, черты, отдаленно напоминающие какое-либо существо, большие уши, но при этом у него нет ни глаз, ни носа, ни рта. Его высота составляет около 28 сантиметров, и, когда вы ставите его на стол, голова Трэвиса оказывается примерно на уровне с лицом сидящего перед столом человека. Робот может кивать, раскачиваться или отворачиваться. У Трэвиса имеется часть, которую можно трактовать как вытянутую ногу, а также у него имеется вытянутая рука, в которой он держит смартфон, благодаря которому он работает.
Первый эксперимент

Когда участники (102 студента) прибыли в лабораторию, им было сказано, что они принимают участие в тестировании нового алгоритма понимания речи для роботов, и в рамках этого тестирования робот будет пытаться понять, что человек ему говорит. Участников попросили рассказать роботу о проблеме, заботе или стрессовой ситуации, с которой они столкнулись в недавнее время, например, о недавней ссоре с другом или членом семьи или о серьезной болезни. Их попросили также описать их проблему в трех частях, а также говорить, когда они заканчивают рассказывать каждую часть, после чего робот будет отвечать им с помощью смартфона. Однако участники не знали, что их случайным образом разделили на две группы. В «реагирующей» группе Трэвис находился лицом к участнику, когда тот рассказывал о своей проблеме, периодически слегка кивая головой и покачиваясь. Также в конце каждой из трех частей на экране смартфона демонстрировалось сообщение из готового набора, такое как «Я понимаю, через что ты проходишь» или «Тебе, наверное, пришлось нелегко». В действительности Трэвис даже не выбирал эти сообщения. Один из ученых слушал беседу и выбирал подходящее сообщение в нужное время.
Вторая группа
Участники «нереагирующей» группы столкнулись с совершенно другим Трэвисом. Он не кивал и не качался, а текст, который отображался на экране смартфона после завершения каждой из частей рассказа, просто сообщал участнику, чтобы он продолжал говорить. После завершения «беседы» участников попросили оценить робота по ряду критериев в форме ответов на несколько простых вопросов о том, насколько отзывчивым был Трэвис. Например, их просили по шкале от одного до десяти оценить, насколько они согласны с фразами «Робот понимал, что я думаю и чувствую» или «Робот действительно меня слышал». Другие вопросы также уточняли, насколько общительным и компетентным был Трэвис.
Каков же результат?

Также видеозаписи общения каждого из участников с Трэвисом были оценены независимыми судьями, которые не знали о том, в каких условиях находится каждый участник. Анализ беседы показал, что участники, которые общались с отзывчивым роботом, не рассказали больше о сути своей проблемы, чем участники, которые общались с неотзывчивым роботом. Однако отзывчивый Трэвис получил гораздо более высокую оценку по шкале общительности и компетентности (его описывали как способного, надежного и знающего). Что еще важнее, когда независимые судьи просматривали и оценивали видеозаписи, они заметили, что те участники, которые общались с отзывчивым Трэвисом, сами были гораздо более отзывчивыми по отношению к роботу и шли на открытый разговор. Они чаще наклонялись вперед к Трэвису, улыбались, поддерживали с ним зрительный контакт. Точно то же самое было обнаружено и в последующем исследовании, в рамках которого участников просили рассказать не отрицательное, а положительное событие в их жизни.
Выводы
Таким образом, даже когда робот не напоминает человека, люди быстро ухватывают даже самые слабые сигналы отзывчивости на их собственные слова и действия. Соответственно, дизайн робота не должен иметь большое количество различных деталей, жестов и вариантов действий, чтобы повысить человеческую оценку его отзывчивости и социальности. В результате можно сказать, что это открывает гораздо больше возможностей для того, чтобы разрабатывать функциональных роботов. Но что если человеку приходится столкнуться с роботом непосредственно тогда, когда он находится в состоянии стресса? Не когда он просто вспоминает что-то плохое, а переживает реальный физический и когнитивный стресс. Сможет ли стресс помешать человеку «прочитать» невербальную эмоциональную экспрессию робота?
Что насчет «чтения» эмоций в состоянии стресса?
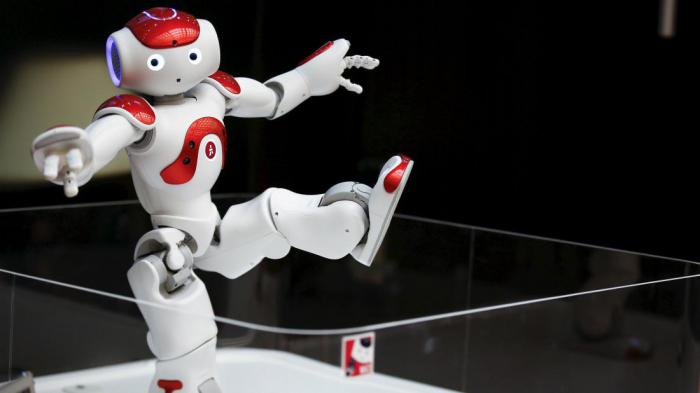
И хотя исследования продемонстрировали, что люди способны читать эмоциональные выражения у роботов в повседневных нейтральных условиях, второе исследование, о котором пойдет речь, стало первым в истории, изучившим реакцию человека на робота непосредственно во время сильного стресса. В рамках исследования были симулированы стрессовые условия. Ученые заставляли участников погружать руку в ледяную воду на определенные промежутки времени, при этом подвергая их еще большему стрессу, заставляя решать сложные математические задания в уме. После этого их просили оценить эмоционально-экспрессивные или статически позы 60-сантиметрового робота-гуманоида Нао. Выражение лица и глаз Нао оставались неизменными, в то время как тело робота занимало одну из 25 различных поз, которые демонстрировали либо положительные, либо отрицательные эмоции.
Результаты второго исследования
Повлиял ли стресс на то, как участники могли «читать» позы робота? Второй группе участников повезло больше, они погружали руку в теплую воду и в уме выполняли простейшие арифметические примеры. Однако оказалось, что стресс оказывает крайне малое влияние на то, как люди воспринимают эмоции, за исключением тех поз, которые демонстрировали сильное оживление или возбуждение. Когда участники сами были подвержены стрессу, они воспринимали негативные позы робота как более негативные и менее оживленные или возбужденные. Другими словами, стресс немного сместил восприятие эмоций робота, поэтому негатив казался еще большим негативом, а позитив – меньшим позитивом.
Источник
Смогут ли роботы почувствовать собственное «я»?
28 февраля 2019
Человеческая природа основывается на чувстве собственного «я». Без этого мы не могли бы ориентироваться, взаимодействовать, проявлять чувства и выживать в постоянно меняющемся, сложном мире людей. Чувство самоощущения нужно не только когда мы совершаем определенные действия, но и когда мы предполагаем последствия этих действий для себя и других.
Поскольку рано или поздно роботов планируют впустить в наш социальный мир, формирование чувства самоощущения в ИскИнах является одной из главных задач для ученых. Если машинам все-таки суждено заботиться о нас и стать нашими компаньонами, то они должны быть способны поставить себя на наше место. И хотя ученым еще очень далеко до создания робота, так же как человек, обладающего чувством собственного «я», шаг за шагом они приближаются к этой цели.
Авторы нового исследования, опубликованного в Science Robotics, разработали роботизированную руку, имеющую представление о своей физической форме – один из основных принципов самоощущения. Это очень важный шаг в развитии отрасли.
Точного научного объяснения чувства человеческого «я» не существует. Последние исследования в области нейробиологии демонстрируют, что кортикальные сети в двигательной и теменной частях мозга часто активируются в ситуациях, когда мы не совершаем физических движений. Например, при словах «укол или пинок» активируются двигательные зоны мозга. То же самое происходит, когда мы наблюдаем за движущимся человеком.
Выведенная в результате этих наблюдений гипотеза состоит в том, что мы понимаем других так, как будто действуем сами – явление, которое ученые называют «воплощенной симуляцией». Другими словами, мы используем свою возможность задействовать телесные ресурсы для того, чтобы придать значение действиям или целям других людей. Механизм, лежащий в основе этого процесса симуляции, представляет собой ментальную модель тела или самого себя. И именно это ученые пытаются воспроизвести в машинах.
Физическое «я»
Для создания модели самоощущения в роботизированной руке команда ученых использовала сеть глубокого обучения и данные случайных движений. Очень важно то, что устройству ИИ не сообщалось какой-либо информации о его геометрической форме или основополагающих физических процессах – все это робот узнавал постепенно, в процессе движения и взаимодействия с различными предметами, точно так же, как познает себя ребенок.
В дальнейшем машина сможет использовать эту модель самоощущения, содержащую информацию о ее форме, размере и движениях, для прогнозирования будущих состояний действий, например, она сможет взять что-то с помощью инструмента. Когда ученые внесли в роботизированную руку физические изменения, противоречия между прогнозами робота и реальностью заставили исследователей начать учебный процесс заново, чтобы позволить роботу адаптировать модель своего «я» под новую форму тела.

Хотя в описываемом исследовании использовалась одна рука, подобные модели были разработаны и для человекоподобных роботов.
Полное «я»
Тем не менее, такое самоощущение робота очень далеко от человеческого. Подобно луковице, наше восприятие самих себя имеет несколько слоев, включающих способность идентифицировать свое тело, находясь внутри его физических границ и воспринимая мир со зрительно-пространственной перспективы этого тела. Однако в это ощущение также входят процессы, выходящие за внешние рамки, такие как интеграция сенсорной информации и представление во времени, получаемые через память, самоидентификацию, а также принадлежность и конфиденциальность действий (люди не могут читать чужих мыслей).
Хотя задача создания чувства самоощущения во всех этих слоях у робота все еще очень далека от завершения, ее отдельные компоненты, такие как схема, продемонстрированная в описываемом исследовании, уже формируются. Можно создать машины, имитирующие других людей и прогнозирующие их намерения или адаптирующие их восприятие. Такие разработки наряду с развитием эпизодической памяти также являются важными шагами на пути к созданию социально осознающих себя роботов-компаньонов.
Любопытно, что данное исследование также может оказаться полезным в исследовании самоощущения человека. Теперь нам известно, что роботы могут приспосабливать физическую модель своего «я» к изменениям, производимым в их теле. Альтернативный способ подумать об этом – представить процесс в контексте использования инструментов животными, когда их тело соприкасается с различными внешними предметами (палки, вилки, мечи или смартфоны).
Результаты исследований демонстрируют, что во время хватания предметов рукой и щипцами у обезьяны активизируются одни и те же нейроны, то есть обученная пользоваться щипцами обезьяна воспринимает их как свои пальцы. Инструмент становится частью тела и физическое самоощущение изменяется. Это похоже на то, как мы ассоциируем себя с аватаром на экране компьютера, играя в видеоигры.
Интересная идея, впервые предложенная японским нейробиологом Ацуши Ирики (Atsushi Iriki), состоит в том, что способность объединения внешних объектов с телом и способность восприятия других тел в качестве инструментов являются двумя сторонами одной медали. Примечательно, что это смутное различие требует появления виртуальной концепции – себя – действующей в качестве символа-заменителя между предметом/участником и объектами/инструментами. Внесение изменений в «я» путем добавления или исключения инструментов может помочь нам понять способ работы этого «я».
Роботы, которые учатся использовать инструменты в качестве дополнения к своему телу, являются очень эффективными экспериментальными площадками для проверки новейших данных и теорий нейробиологии и психологии. Постепенно исследования приведут к разработкам новый, более разумных и когнитивных машин, которые будут работать на (и для) людей в самых различных сферах.
Возможно, именно это является самым важным аспектом исследования. В конечном итоге психология, нейробиология и инженерия объединятся для того, чтобы понять один из самых фундаментальных вопросов науки: «Кто я такой?»
Источник
Почему роботы никогда не боятся: чувства искусственного интеллекта
Нужно ли чувство страха искусственному интеллекту? Обладают ли им современные роботы? Как страх будет влиять на действия роботов? Ответим на все эти вопросы сегодня…
Страх — чувство, которое присуще каждому разумному существу, в том числе и человеку. Природа страха бывает разной, но, в первую очередь, страх основывается на инстинкте самосохранения и на чувствие опасности, а также — неизвестности.
Роботы — это имитация человека с попыткой отразить поведение человеческого интеллекта. Другими словами, робот — это искусственный интеллект, в некоторых случаях — облаченный в человеческую оболочку. Насколько присущи роботам чувства биологических организмов и почему роботы никогда не боятся?
Люди всегда мечтали создать существо похожее на человека. К 2019 году попытки создания искусственного человека всё еще напоминают слабые потуги объять необъятное, которые ясно дают понять насколько сложна и уникальна природа — в общем, и каждый живой организм — в частности.
Безусловно, механизмы, имитирующие движение человека уже созданы, также существуют алгоритмы распознавания и воспроизведения речи человека. Роботы могут общаться с человеком, копировать манеру разговора, движения, но насколько все эти имитации ограничены и даже жалки мы говорить не беремся.
До сих пор у роботов не были созданы чувства — страх относится именно к этой категории переживаний. Даже умные биороботы не имеют чувства страха и вряд ли специалисты будут создавать «чип» страха в ближайшее время
Человеческую природу определяют сотни и тысячи факторов — у человека есть определенные инстинкты. К ним можно отнести следующие категории:
Природа человеческого страха многолика — страх может быть природным, патологическим, экзистенциальным. К природному страху можно отнести инстинкт самосохранения; к патологическому — необъяснимый страх на фоне относительного благополучия, если говорить языком популярной психологии. Экзистенциальный страх связан с самой сущностью человека, а не с конкретными событиями в жизни индивидуума.
У роботов нет инстинктов — они не могут иметь потомство, они также не осознают ценность своей жизни, не испытывают чувства голода, кроме этого у роботов отсутствует воля. Безусловно, можно заложить все составляющие биологического организма, включая чувства, при помощи программирования, но подобный искусственный интеллект не будет полноценным. Почему? Потому что предусмотреть все «модули» живого человека невозможно, особенно — когда речь заходит о головном мозге, который является самой сложной частью человеческого существа и вообще все природы
Тем не менее технологические возможности стремительно развиваются — возникновение «чипа» страха вполне возможно. Нужен ли он? Конечной целью создания роботов является возможность их эксплуатации там, где не может находиться и работать человек. Соответственно, чувство страха у рабочих роботов быть не должно.
Умные роботы в отдаленном будущем будут незаменимы, в первую очередь, при выполнении работ сопряженных с опасностью для жизни — армия, работа на атомных реакторах, экстремальные подводные работы, работы в космосе, работы в вакуумных средах
При работе в таких условиях роботам, безусловно, не желательно иметь чувство страха. Следует также отметить тот факт, что если робот будет обладать хоть какими-то чувствами, то он может быть причислен к живому организму…
Источник