Робот, который может «чувствовать»

Что отличает интеллектуального андроидного человекоподобного робота от обычного? В первую очередь, это большее число возможностей, позволяющих ему не просто двигаться и совершать какие-то задачи, но и «общаться» с человеком. Например, реагировать на прикосновения, отвечать на вопросы, «видеть» стоящий перед ним объект. Все это и многое другое умеет делать робот Нао, приехавший «на постоянное место жительства» в лабораторию робототехники ТУСУРа.
Родина «умного» робота — Франция. Его производитель, компания Aldebaran Robotics, поставляет модели Нао только научным лабораториям и университетам исключительно в исследовательских целях. Однако и после «расставания» со своим продуктом французская компания продолжает следить за его «успехами», а точнее успехами тех ученых, которые в дальнейшем продолжают совершенствовать функциональные возможности своего «высокотехнологичного» подопечного. Именно такая задача и стоит сейчас перед программистом лаборатории робототехники ТУСУРа Алиной Зиминой и студентом факультета электронной техники Андреем Баюном.
― Этот робот и правда весьма «умный». Возможности Нао зависят от программного обеспечения и специалиста, работающего с ним — человек «говорит» роботу, что нужно сделать, и тот выполняет команду. А заложено различных команд в него немало. Сервоприводами управляет мощный процессор, на манер тех, что устанавлены в современных ноутбуках. Еще эта модель робота имеет сложную систему движений, — рассказала Алина Зимина.
Как пояснили студенты, разработчики робота позаботились о том, чтобы Нао мог удерживать равновесие. Например, поскользнувшись, он подгибает ногу в нужном положении, а когда падает — группируется, чтобы получить меньше повреждений при ударе. Кроме того, он обладает 25 степенями свободы — то есть, помимо всех прочих функций, у него еще двигаются пальцы на руках, которыми он может что-то брать и даже пытаться рисовать.
Множество датчиков, которыми оснащен Нао, служат ему подобием человеческих органов зрения, слуха и осязания. Так, две видеокамеры, расположенные на голове робота, выполняют роль глаз — Нао может распознавать объекты. Так, студенты ТУСУРа научили его узнавать цифры по их изображению на карточках и производить с ними простые арифметические действия, полученный результат Nao озвучивает при помощи встроенного синтезатора речи. Правда, говорить на русском языке «умный» робот не умеет. Надеемся, что пока не умеет.
— Такой функции разработчики в программное обеспечение Нао не добавили, но мы собираемся исправить эту недоработку самостоятельно. Сейчас робот говорит на английском языке, но с сильным французским акцентом, — смеется Алина Зимина.
Ко всему прочему интеллектуальный робот оснащен встроенными тактильными датчиками, благодаря которым может в прямом смысле слова «почувствовать», когда к нему кто-то прикасается. Такие датчики находятся на голове и руках Нао. К примеру, если робота погладить по голове, он на это отреагирует. А благодаря специальному бамперу на ногах Нао может почувствовать, что споткнулся.
— Реакция на прикосновения и спотыкания у него может быть самой разной — в зависимости от пожелания программиста. Это могут быть движения, звуки и даже целые фразы, например, «Я споткнулся». Правда, Нао не способен определять температуру поверхности, и в этом есть определенная проблема. Так, прикоснувшись к раскаленному металлу, он не осознает, что нужно убрать руку, — пояснил Андрей Баюн.
Привезенный в лабораторию ТУСУРа «умный» робот не единственный из «живущих» в Томске. Примерно год назад такую же модель, но чуть более старой версии, заказали на факультет философии ТГУ.
— Философы говорят, что он нужен им для изучения взаимодействия робота и человека. Практика использования интеллектуальных роботов университетами сегодня не является редкостью. На Западе она распространена больше, у нас пока в меньшей степени, — рассказал заведующий лабораторией робототехники и искусственного интеллекта института инноватики ТУСУРа Евгений Шандаров.
ТУСУР приобрел робота не только с целью дать студентам возможность поработать над дальнейшим функциональным оснащением Нао, но и подготовить его к участию в соревнованиях по киберфутболу. Лаборатория робототехники ТУСУРа уже несколько лет проводит чемпионаты между командами студентов по «Робоболу» — футбольным матчам с участием более простых роботов.
— Недавно лига по киберфутболу ФИРА внесла в список допустимых к участию роботов и интеллектуальные модели. Я считаю, мы можем подготовить команду «умных» роботов для участия в мировом турнире по киберфутболу. Правда, для участия в матче нужна команда как минимум из пяти таких моделей. Будем работать в этом направлении, — поделился планами Евгений Шандаров.
Источник
Осязание у роботов – возможно ли это?
Каких только роботов не существует в наше время – роботы, которые умеют ходить, видеть, разговаривать и слышать, а также манипулировать различными предметами. Есть даже роботы, способные ощущать запахи.
Но что насчет чувства осязания? На первый взгляд, вроде бы здесь все просто, и роботы, способные распознавать предметы через прикосновение, уже существуют, однако в используемых методах присутствует ряд ограничений. В частности, большинство роботизированных механизмов обладают лишь регуляцией силы нажатия.
Всем известно, что в жизни людей тактильные ощущения играют очень важную роль. Манипулируя предметом, человек фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности этого предмета. Если чувство осязания будет присутствовать у роботов в полной мере, то в процессе манипуляций с мягкими и хрупкими предметами возможность их повреждения сведется к минимуму или исключится совсем.
«Умная кожа»
Для количественного определения осязания с технологической точки зрения требуется не только знание силы внешнего давления, применяемой для осязательного датчика, — необходимо владеть информацией о точном месте нажатия, его угле и способе взаимодействия с объектом манипуляций.
Также нужно определить, какое количество датчиков осязания необходимо роботу. Разработка «кожи» робота, оснащенной сотнями и даже тысячами тактильных датчиков — очень сложная технологическая задача, при решении которой важно понимать и учитывать физические механизмы контактного восприятия в биологическом мире.
Чаще всего осязание измеряется при помощи датчика, способного преобразовать силу нажатия в электрический сигнал. Так, в электронных весах, при помощи которых мы узнаем своей вес или взвешиваем продукты на кухне, обычно используется пьезоэлектрический преобразователь — устройство, которое превращает силу давления в электричество. После этого электрический ток передается по проводам в небольшой микрочип, который считывает силу тока, преобразует ее в вес и отображает на экране.
Однако, несмотря на то, что подобные электронные устройства способны распознавать разные уровни силы давления, они не могут использоваться для смарт-кожи вследствие наличия ряда ограничений. В частности, они имеют относительно медленную скорость реакции на нажатие.
Существуют также виды датчиков, основанные на физическом изменении других электрических характеристик, таких как электрическая емкость и сопротивление. Данная технология используется, например, при производстве некоторых моделей мобильных телефонов и компьютеров.
В последние годы ученые усиленно (и успешно) работают над созданием тактильных датчиков, которые можно встраивать в мягкие и гибкие материалы – именно такая технология необходима для использования в смарт-коже роботизированных машин.
Тем не менее, большая часть всех этих разработок испытывает проблемы при контакте с влагой (вспомните, что происходит, когда вы прикасаетесь к сенсорному экрану смартфона мокрым пальцем).
Основной областью применения гибкого и надежного восприятия нажатия на сегодняшний день является медицина. Например, смарт-кожа может использоваться для восстановления сенсорной реакции у пациентов с повреждениями кожи или периферической нейропатией (онемением или покалыванием). Также ее можно применять при протезировании рук.
Недавно ученые Массачусетского технологического института (MIT) и Гарвардского университета разработали тактильную перчатку, функционирующую на основе искусственного интеллекта. Подобно руке человека, перчатка оснащена 548 датчиками, расположенными на трикотажной ткани, соединенной с пьезорезистивной пленкой (которая также реагирует на давление или растяжение), и объединенными сетью проводящих электродов. Это позволяет перчатке оценивать характеристики захватываемых предметов. Данная разработка открывает большие перспективы в области осязания роботов и может впоследствии использоваться при создании протезов и роботизированных инструментов захвата.
Тем не менее, аналогично всем остальным сенсорным интерфейсам, технология также не работает при контакте с водой.
Оптическое измерение силы нажатия
В этой связи ученые уже несколько лет работают над новым видом тактильного датчика, использующим для измерения «мягких прикосновений» тончайшие пленки органических светодиодов (OLED) и фотосенсоров (OPD). Обычно технология OLED используется в экранах телевизорах и смартфонов. Новый подход к измерению чувства осязания основан на осязании оптического давления. В случае успеха роботы в будущем смогут получить чувство осязания, в данный момент доступное только живым существам.
Элементы OLED (диоды или пиксели) обычно являются полностью реверсивными. Это значит, что помимо способности производить свет (как в случае с экраном телевизора), эти пиксели могут также его определять. Используя этот принцип, можно создать крошечный, светонепроницаемый, эластичный купол с отражающим покрытием, помещенный поверх нескольких OLED-пикселей. Если купол не тревожить, выпускаемый из центрального пикселя свет равномерно распределяется среди других пикселей под куполом.
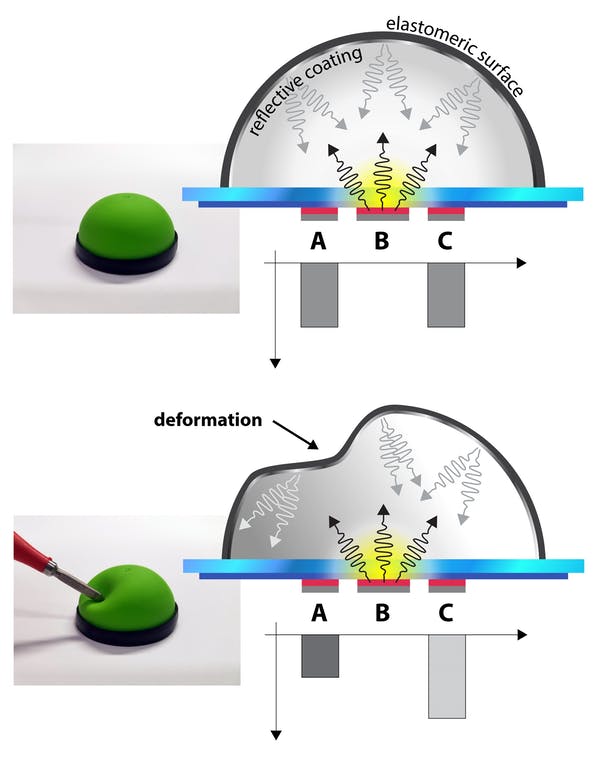
Однако если на купол нажать, прикасаясь к чему-либо, он деформируется в результате неравномерной реакции пикселей, используемых для определения отражаемого света. Соединив реакции десятков таких куполов в области контакта, можно будет оценить применяемую силу нажатия.
Данный подход является важным шагом на пути к созданию и использованию смарт-кожи. Вполне возможно, что очень скоро мы увидим роботов, способных чувствовать прикосновения, находясь не только в воздухе, но и под водой.
Источник
Робота научили чувствовать боль

Leibniz University of Hannover
Исследователи из Ганноверского университета предложили разработать аналог нервной системы для роботов, позволяющий им «чувствовать боль». Первые результаты ученые представили на конференции ICRA 2016 в Стокгольме, сообщает IEEE Spectrum.
Ученые считают, что роботы, чувствующие боль, смогут быстро реагировать на потенциально опасную для них ситуацию и таким образом минимизировать вред не только для окружающих, но и для самих себя. Предлагаемая исследователями система поможет роботам классифицировать разную боль по степени опасности для собственных механизмов и электроники и реагировать на нее по-разному.
Для демонстрации своей разработки исследователи оборудовали промышленный манипулятор Kuka датчиком BioTac, имитирующим подушечку пальца. Датчик может определять силу нажатия и температуру, а алгоритм, управляющий поведением робота, решает на основании показаний датчика, какую именно боль испытывает робот.
Если боль слабая, то манипулятор старается плавно уйти от контакта с раздражителем, причем чем сильнее боль, тем более резко и быстро робот реагирует боль. Если достигнут условный болевой порог, то алгоритм считает, что для снижения вероятности дальнейших повреждений необходимо отключить активное уклонение от источника боли и перейти в пассивный режим «подчинения» внешней силе. Также робот умеет определять угрозу условного ожога и уходит, например, от контакта со слишком горячими объектами.
При этом авторы отмечают, что системы предотвращения столкновений с препятствиями или людьми в робототехнике применяются достаточно давно, однако ключевое их отличие именно в том, что робот не избегает потенциальных повреждений, а в принципе уходит от контакта.
Источник
Роботы, которые чувствуют боль: ещё один шаг к ИИ


Одно из самых полезных свойств роботов заключается в том, что они не чувствуют боли. Благодаря этому мы можем заставить их работать в опасных условиях и выполнять действия, угрожающие жизни или вообще смертельные для человека — например, разминирование бомб или проникновение внутрь атомной станции после серьёзной аварии. Однако немецкие учёные из Университета имени Лейбница в Ганновере считают, что в некоторых ситуациях роботам может пригодиться способность чувствовать боль и реагировать на неё.
Зачем это нужно? Затем же, зачем и человеку. «Боль — это система, которая нас защищает, — считает один из авторов проекта Иоханнес Кюн. Мы уклоняемся от источника боли, и это помогает нам избежать травм». Люди, которые неспособны чувствовать боль, травмируются гораздо чаще других, поскольку их тела не реагируют на потенциальную опасность.
На Международной конференции по робототехнике и автоматизации ICRA 2016, проходившей в середине мая в Стокгольме, Кюн и профессор Сами Хаддадин, эксперт по безопасному взаимодействию между человеком и роботами, рассказали о своей работе по созданию искусственной нервной системы для роботов. Такая система позволила бы машинам чувствовать боль и быстро реагировать на неё во избежание возможных повреждений электродвигателей, механики и электроники.
Человек рефлекторно реагирует на раздражители, поэтому в основу такой конструкции положен так называемый рефлекторный контроллер. Идея далеко не нова: ещё в 2011 году Торстен Крёгер из Стэнфорда и его коллеги из Университета Рима продемонстрировали роботизированную руку, способную уклоняться от столкновения с людьми. Однако этот контроллер озабочен исключительно тем, чтобы не коснуться человека и совершенно не думает о своей собственной безопасности. Настоящая же искусственная нервная система построена на том, как человек реагирует на болезненные ощущения, то есть робот должен распознавать и классифицировать непредвиденные физические воздействия, оценивать их потенциальный вред и предпринимать меры защиты.
Источник