Глава 3. Очувствленные роботы — роботы второго поколения
1. Искусственные органы чувств
Многие роботы первого поколения, используемые в сфере производства, остро нуждаются в очувствлении с целью получения информации об окружающей среде, а также в дальнейшем совершенствовании управляющей системы. Так, например, в инструкции по эксплуатации программного манипуляционного робота «Юнимейт», в частности, отмечается: «Робот лишен зрения и разума. Поэтому любой предмет или человек, оказавшийся на его пути, получит удар от движущейся «руки». В результате пострадает либо человек, либо мешающий роботу предмет, либо сам «Юнимейт».
Мы уже отмечали в предыдущей главе, что роботы первого поколения не способны оперировать с неизвестными произвольно расположенными и неориентированными объектами и требуют создания дополнительных приспособлений для специальной организации рабочей зоны. Все это усложняет и удорожает автоматизацию, делает ее менее гибкой. Избежать этих неприятных последствий сенсорной и интеллектуальной ограниченности роботов первого поколения можно путем существенного расширения ассортимента и характера информационно-измерительных датчиков и управляющих программ. Так появились роботы второго поколения — очувствленные роботы.
Эти роботы отличаются от роботов первого поколения существенно большим ассортиментом искусственных органов чувств. Это прежде всего тактильные, зрительные, звуковые, а также и некоторые другие сенсорные датчики. Органы чувств роботов второго поколения служат для ввода информации о состояниях робота и окружающей среды в управляющую систему, которая уже не ограничивается запоминающим и программирующим устройством, как в роботах первого поколения, а требует для своей реализации управляющей ЭВМ. Именно очувствление в сочетании с достаточно совершенным и разнообразным программным обеспечением управляющей ЭВМ позволяют» роботам второго поколения работать с неориентированными предметами произвольной формы, осуществлять сборку и монтаж конструкций по чертежу, взаимодействовать с внешней средой, выполнять требуемую (программную) последовательность операций в меняющейся обстановке. Таким образом, очувствление роботов является необходимой предпосылкой для повышения их функциональных возможностей.
Информационно-измерительная система очувствленных роботов, т. е. система их органов чувств, состоит из сенсорных датчиков внешней и внутренней информации. Соотношение между датчиками информации и их взаимодействие у этих роботов существенно другие, чем у программных роботов. Важно отметить, что для очувствленных роботов значительную роль играют датчики внешней информации, предназначенные для восприятия, анализа, распознавания и контроля состояний внешней среды. В качестве датчиков внутренней информации могут, в частности, использоваться датчики, применяемые в роботах первого поколения.
Каковы же требования, предъявляемые к датчикам внешней информации? Какова конструкция и основные характеристики этих датчиков?
В зависимости от назначения очувствленного робота его датчики внешней информации должны имитировать осязание, зрение, слух и т. п. Кроме того, могут потребоваться датчики для измерения радиоактивности, давления, влажности, температуры и других физических величин. Эти датчики должны обладать высокой точностью, надежностью, быстродействием, а также иметь малые габариты, вес и стоимость.
Надо отметить, что сейчас техника располагает датчиками и приборами, которые во много раз чувствительнее наших органов чувств. Микрофон слышит лучше, чем человеческое ухо, фотоэлемент видит большую часть спектра лучше, чем глаз. Сейсмограф более чувствителен, чем наши органы осязания, и, конечно, температуру по сравнению с термометром человек определяет совсем плохо.
Пожалуй, только одно чувство — обоняние, т. е. обнаружение и определение небольших количеств примесей органического вещества, у человека и животного более совершенно, чем у существующих приборов. В этой связи интересно напомнить, что органы обоняния — одни из самых сложных органов чувств, а природа явления, на основе которого они функционируют, до сих пор не открыта. Поэтому «догнать обоняние собаки» — одна из актуальных проблем очувствления роботов.
Опыт изучения органов чувств человека и животных содержит много сведений, которые могут быть использованы в качестве предпосылок для разработки искусственных органов чувств. В живых системах все органы чувств оснащены собственными органами движения, которые в свою очередь богато снабжены кинестетическими рецепторами. При восприятии существенная роль принадлежит как отдельным рецепторам, так и рецептивным полям и локальным детекторам, позволяющим выделять определенные простейшие признаки объектов. При анализе среды и внутреннего состояния важную роль играет совместная координированная обработка сенсорных сигналов различных типов с учетом производимых действий.
Взаимодействие человека с внешней средой в значительной степени основано на переработке зрительной, звуковой и тактильно-кинестетической информации. Существуют также ситуации, когда только тактильные и кинестетические ощущения способны дать правильную информацию о характеристиках среды. Эти ситуации возникают, например, тогда, когда необходимо осуществлять микродвижения пальцев для определения формы и качества поверхности окружающих предметов, а также в тех случаях, когда имеются помехи зрительному контролю.
Рассмотрим более подробно некоторые типы искусственных органов чувств, предназначенных для измерения характеристик внешней среды.
Тактильные и кинестетические датчики. Решение многих задач, связанных с поиском предметов, их захватом и манипулированием ими, стало возможным только с разработкой датчиков, обладающих тактильной и кинестетической чувствительностью. Простейшим типом таких датчиков являются контактные датчики. Они представляют собой микропереключатели, фиксирующие соприкосновение с предметом.
Тактильные датчики позволяют реагировать на прикосновение и измерять давление в местах соприкосновения (контакта) датчика с предметом. Они обычно размещаются на бамперах транспортных роботов или на схвате манипуляционных роботов. Эти датчики служат для обнаружения отдельных предметов, предотвращения повреждений этих предметов и самого робота, а также для распознавания внешней обстановки путем соприкосновения и ощупывания.
Кинестетические датчики регистрируют положение, перемещение исполнительных органов (например, пальцев захвата манипулятора) и возникающие в них усилия.
Важной особенностью тактильных и кинестетических датчиков является их способность работать практически в любой среде. В частности, эти датчики незаменимы для подводных роботов, так как при замутнении воды перестает работать телевизионный или оптический канал обратной связи.
Зрительные датчики. Для автоматического восприятия и анализа объемных (трехмерных) сцен необходима специальная аппаратура, которая по существу должна имитировать в функциональном отношении работу глаз. Она должна обеспечивать решение таких задач, как активный поиск объектов путем изменения ориентации зрительного датчика, автоматическая фокусировка изображения, измерение дальности до предметов, настройка чувствительности датчика в зависимости от изменения условий освещенности, выделение признаков изображения (цвет, текстура, контуры, размеры, форма и т. п.).
При зрительном очувствлении роботов источником информации служат телевизионные и оптические датчики. Телевизионный датчик («телеглаз») представляет собой телевизионную камеру с тем или иным законом развертки, в процессе которой все изображение или его фрагмент фиксируется в памяти в виде двухмерной матрицы распределения яркости оптической проекции реальной объемной сцены. В супервизорном режиме управления роботом обычно предусматривается возможность целеуказания, например, путем прикосновения «световым пером» к соответствующему месту экрана дисплея, на котором высвечиваются телекадры поля зрения. Однако телевизионное изображение является плоским, в отличие от самих предметов, которые, конечно, имеют три измерения. Это лишает человека и робота объемности восприятия и связанного с ним «эффекта присутствия». Поэтому большое значение для очувствления роботов приобретают средства голографии, которые позволяют записывать и восстанавливать не двухмерное распределение яркости, а световую волну, исходящую от предмета, со всеми ее подробностями. Для определения цвета предметов в роботах используются фотоэлементы, фотодиоды, светофильтры, световоды и другие элементы вместе с источниками света. Обнаружение и определение положения предмета с помощью оптических датчиков основано на регистрации сигналов при пересечении предметом светового потока.
Ведутся исследования по созданию сканирующих лазерных дальномеров, голографического телевидения и т. п. Основным недостатком зрительных датчиков является их непригодность при отсутствии источников света или в условиях с сильным рассеянием или поглощением света, например, под водой или в космическом пространстве.
Звуковые датчики. К звуковым датчикам относятся разного рода микрофоны и ультразвуковые датчики. Микрофоны служат для восприятия звуковых команд при голосовом управлении роботом. Ультразвуковые датчики состоят из передатчика и приемника сигналов. С помощью отраженного от предметов ультразвукового сигнала они могут их обнаруживать и определять расстояние до них.
Ультразвуковые датчики имеют по сравнению с оптическими следующие преимущества: они могут обнаруживать прозрачные объекты; их показания не зависят от условий освещения и малочувствительны к изменению физических свойств среды (пыль, пар, жидкая среда); срок службы генераторов колебаний практически неограничен и т. д. Однако ввиду нечеткой направленности ультразвуковых колебаний точность определения расстояний до предметов у таких датчиков невысока. Кроме того, они не способны обнаруживать объекты с очень малыми габаритами, что связано с относительно большой длиной ультразвуковых волн.
Помимо описанных датчиков, очувствленные роботы снабжаются по мере необходимости и другими: магнитометрами, температурными датчиками и т. д.
Источник
Искусственные органы чувств робота предназначенные для восприятия




«Органы чувств» робота
Если мы еще раз обратимся к «скелету» робота (схема 1), то увидим, что из всех представленных в нем элементов мы не рассмотрели только один, но очень важный — «органы чувств» робота, его датчики, образующие сенсорную систему. Без них не может действовать никакая система управления: не получая сведений об окружающей обстановке и «поведении» самого робота, она не сможет принять ожидаемого от нее решения.
Говоря о сенсорной системе робота, подчеркнем, что она собирает два вида нужной для СУ информации: 1) о собственном состоянии робота и 2) о состоянии объекта манипулирования и окружающей среды.
Под состоянием робота подразумеваются координаты- и ориентация в пространстве манипулятора, скорости и ускорения его звеньев, а также усилия, развиваемые его приводами. Сенсорные устройства, информирующие о состоянии робота, называют также датчиками обратной связи. Это датчики положений, скоростей и ускорений звеньев манипулятора относительно друг друга.
Изменение координат фиксируют датчики, выполненные, например, в виде прецизионных потенциометров и катушек переменной индуктивности.
Прецизионный потенциометр представляет собой прибор типа хорошо известного вам проволочного реостата. Из его названия — прецизионный, т. е. высокоточный, следует, что он должен быть выполнен очень качественно. Его наматывают специальным (из сплава с большим удельным сопротивлением) проводом, тщательно контролируя равномерность намотки (плотность витков), и предпринимают ряд других мер с тем, чтобы достичь линейности его характеристики, когда сопротивление меняется точно пропорционально смещению подвижного контакта потенциометра (длине включенного участка обмотки). Для увеличения точности показаний используются иногда так называемые многооборотные потенциометры (рис. 33). В них вращающийся контакт не перескакивает с витка на виток, как при смещении ручки обычного потенциометра (реостата), а следует вдоль самих витков провода. В результате большей плавности изменения сопротивления повышается точность измерений.
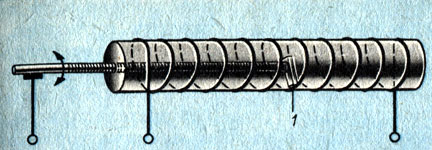
Рис. 33. Многооборотный потенциометр, служащий в качестве датчика местоположения звеньев манипулятора (1 — подвижный контакт)
Потенциометр крепится в «руке» робота так, чтобы при повороте одного звена манипулятора относительно другого подвижный контакт потенциометра тоже смещался и, следовательно, сопротивление прибора менялось. По тому, на сколько оно изменилось, судят о взаимном перемещении звеньев манипулятора.
Аналогично работает датчик положения, в котором используется катушка переменной индуктивности. При взаимном перемещении звеньев манипулятора происходит смещение, например, связанного с ними сердечника, вследствие чего индуктивность катушки меняется. Иногда ставится в качестве такого датчика катушка с двумя обмотками, связанными с теми звеньями манипулятора, о движении которых они должны сигнализировать. При изменении взаимного расположения этих обмоток индуктивность катушки меняется, что и позволяет судить о перемещении звеньев.
Для измерения скоростей звеньев манипулятора применяются тахогенераторы. Что это такое? Это электрогенераторы небольшой мощности, вырабатывающие ЭДС в строгой зависимости от скорости вращения их вала. Тахогенератор, или, как его еще называют, тахометр (измеритель скорости вращения), обычно устанавливают непосредственно на вал двигателя в приводе манипулятора и по значению напряжения, даваемого тахометром, рассчитывается число оборотов двигателя, а по нему — и скорость звена, перемещаемого данным приводом.
Ускорение звеньев манипулятора, к сожалению, непосредственно измерить каким-либо прибором не удается. Его определяют обходным путем — при помощи электронных схем, измеряющих параметры электрического тока в двигателе привода.
Датчики усилий, возникающих в звеньях манипулятора при его работе с внешними предметами или при взаимодействии звеньев друг с другом, представляют собой тензорезисторы. Так называются резисторы, сопротивление которых заметно меняется при механическом воздействии на них. Эти изменения тоже регистрируются специальной электронной схемой. Тензорезисторы реагируют на деформацию конструкции, пропорциональную действующей силе. -В зависимости от деформации меняется их сопротивление. По степени деформации вычисляется сила, ее вызвавшая.
Тензорезисторы обычно наклеивают на те места манипулятора, которые подвергаются наибольшей деформации. Если же конструкция манипулятора такова, что его деформации при работе могут быть значительными, вместо тензорезисторов применяют так называемый подпружиненный потенциометр. Он устроен так же, как описанный выше потенциометр, но снабжен еще пружиной, возвращающей его подвижный контакт после снятия нагрузки в первоначальное положение.
Если достаточно приблизительной информации о возникающих силах, используют токопроводящую резину. Как вам известно, резина — диэлектрик, но она приобретает электропроводные свойства в том случае, когда при ее получении в резиновую массу добавляют мельчайшие частицы металла. Электропроводность такой резины зависит от того, как близко друг к другу расположены частицы металла. Поэтому при ее сжатии (когда частицы металла сближаются) сопротивление заметно уменьшается. После снятия нагрузки резина восстанавливает свою форму, частицы металла расходятся на прежние расстояния, и сопротивление ее, возрастая, приобретает первоначальное значение. Наклеив электропроводную резину на деформируемые части конструкции, можно получить приблизительную информацию о степени деформации и возникающих силах.
К датчикам обратной связи относятся также тактильные 1 датчики, регистрирующие касание манипулятором внешнего предмета. Ими обычно оснащается схват и все подвижные детали робота. Техническая реализация этих датчиков весьма разнообразна: они могут быть выполнены в виде концевых выключателей, в виде специальных конденсаторов и катушек индуктивности, пьезоэлектрических элементов или пластин из токопроводящей резины. Действуют они так.
1 ( От латинского слова tactilis — осязательный; тактильный датчик сигнализирует о прикосновении к предмету.)
Концевой выключатель представляет собой простейшее устройство, служащее для замыкания или размыкания контактов при механическом воздействии. По сути это обычная кнопка, конструкция которой позволяет установить ее на подвижных частях робота. При встрече с препятствием, или, как принято говорить, «попадании на упор», изменение состояния контактов концевого выключателя сигнализирует о том, что в этом направлении дальнейшее движение невозможно.
В качестве датчиков касания в робототехнике применяются и пьезоэлектрические материалы — вещества, в которых при деформации возникает электрический ток. Если касание происходит через пьезоэлектрический элемент (или пластину из токопроводящей резины), то сигналом о том, что подвижная часть робота с датчиком приблизилась к предмету вплотную, служит возникающий при этом вследствие деформации ток (или изменение сопротивления).
Использование в качестве тактильных датчиков конденсаторов и катушек индуктивности специальных конструкций основано на том, что при соприкосновении с предметом емкость конденсатора или индуктивность катушки изменяется; эти изменения и регистрируются специальной электронной схемой, которая посылает соответствующий сигнал в систему управления роботом.
Все описанные тактильные датчики срабатывают только при касании предмета. Если же такое касание по технологическим требованиям происходить не должно, то информацию о наличии препятствия, о приближении к объекту необходимо получить раньше того, как манипулятор его коснется. В этом случае используется эластичный тактильный датчик (рис. 34), имеющий как бы выносные зонды. Корпус такого датчика состоит из мембраны 1 и усов (зондов) 2, выполненных из эластичного материала (например, вулканизированной резины). Даже при микродеформации усов, вызванной их прикосновением к предмету, происходит деформация мембраны и смещение магнита 3 к основанию датчика, где закреплен герметизированный магнитоуправляемый контакт 4. Под влиянием поля магнита, приближающегося к основанию датчика, магнитоуправляемый контакт замыкается — посылается сигнал о близости какого-то предмета. На рисунке 35 показан схват подводного робота, оснащенного такими датчиками.
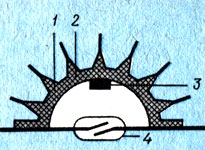
Рис. 34. И. Пластичный тактильный датчик, имеющий усы (зонды), обнаруживающие препятствие до прикосновения к нему самого датчика
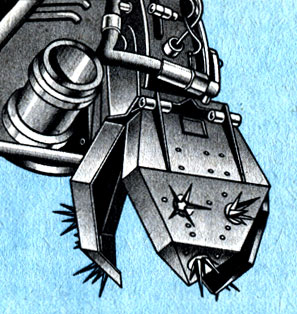
Рис. 35. Схват подводного робота, снабженный эластичными тактильными датчиками, сигнализирующими о близости твердой поверхности
Здесь уместно сказать о том, что мы рассмотрели самые распространенные и простые датчики. Но, как вы могли заметить хотя бы в последнем примере, создание «органов чувств» робота требует подчас от их разработчиков большой находчивости и оригинальности решений. Тем более что для планирования и выполнения рабочих операций системе управления робота обязательно необходима еще информация об объекте манипулирования и окружающей среде. При конструировании соответствующих датчиков важную роль играет учет физических и химических свойств объекта, которые, будучи восприняты специальными, реагирующими на каждое из этих свойств приемниками, трансформируются затем в сигналы. Для регистрации этих свойств создано множество различных устройств. В качестве примера мы рассмотрим лишь наиболее распространенные сенсорные устройства, информирующие о координатах и скорости объекта в рабочей зоне робота. К ним относятся, в частности, оптические дальномеры локационного типа. Принцип их действия состоит в том, что свет от источника, которым является специальная лампа или лазер, направляется через диафрагму на предмет и, отразившись от него, попадает на фотоприемник, сигнал от которого, усиленный электронной схемой, поступает в блок расшифровки: оттуда координаты объекта посылаются на один из уровней системы управления робота. Расстояние до предмета (его координаты) определяется по времени распространения импульса света от источника до приемника, которое в 2 раза превышает время, необходимое световому сигналу для попадания в фотоприемник после отражения от предмета.
Существуют такого же локационного типа ультразвуковые и радиодальномеры, действующие подобно оптическим; у них вместо световых волн для зондирующего импульса используются ультразвуковые или радиоволны. На рисунке 36 показан общий вид ультразвукового дальномера.
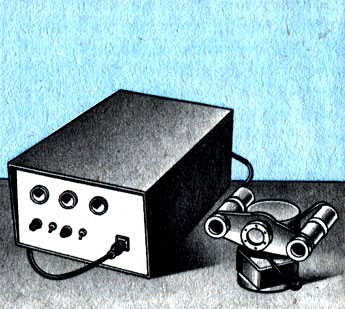
Рис. 36. Ультразвуковой дальномер
Важнейшими сенсорными устройствами стали в настоящее время телевизионные системы; их называют системами технического зрения. Основное назначение таких систем — получение видеоинформации об объектах внешней среды с целью их обнаружения, распознавания и идентификации (отождествления с эталонными). Для этого робот оснащают не только одной телекамерой (одним «глазом»), но и двумя, чтобы его «зрение» было стереоскопическим (объемным); иногда создают направленную подсветку для его «глаз», чтобы они видели прежде всего нужную цель, и т. д. Сердцем любой телевизионной системы является ЭВМ, обрабатывающая по составленному для нее алгоритму полученные от телекамеры сигналы.
Скорость движения объекта в рабочей зоне манипулятора измеряют при помощи прибора, называемого корреляционным измерителем 1 . Устроен он аналогично дальномеру. Отраженный от предмета сигнал попадает в электронную схему, где сравнивается с таким же сигналом, пришедшим несколько раньше. По результатам сравнения вычисляется скорость движения предмета.
1 ( От латинского слова correlatio — соотношение, соответствие; название прибора подчеркивает его основной принцип действия: сравнение приходящих сигналов и определение соотношения между ними.)
Источник