Глава 3. Очувствленные роботы — роботы второго поколения
1. Искусственные органы чувств
Многие роботы первого поколения, используемые в сфере производства, остро нуждаются в очувствлении с целью получения информации об окружающей среде, а также в дальнейшем совершенствовании управляющей системы. Так, например, в инструкции по эксплуатации программного манипуляционного робота «Юнимейт», в частности, отмечается: «Робот лишен зрения и разума. Поэтому любой предмет или человек, оказавшийся на его пути, получит удар от движущейся «руки». В результате пострадает либо человек, либо мешающий роботу предмет, либо сам «Юнимейт».
Мы уже отмечали в предыдущей главе, что роботы первого поколения не способны оперировать с неизвестными произвольно расположенными и неориентированными объектами и требуют создания дополнительных приспособлений для специальной организации рабочей зоны. Все это усложняет и удорожает автоматизацию, делает ее менее гибкой. Избежать этих неприятных последствий сенсорной и интеллектуальной ограниченности роботов первого поколения можно путем существенного расширения ассортимента и характера информационно-измерительных датчиков и управляющих программ. Так появились роботы второго поколения — очувствленные роботы.
Эти роботы отличаются от роботов первого поколения существенно большим ассортиментом искусственных органов чувств. Это прежде всего тактильные, зрительные, звуковые, а также и некоторые другие сенсорные датчики. Органы чувств роботов второго поколения служат для ввода информации о состояниях робота и окружающей среды в управляющую систему, которая уже не ограничивается запоминающим и программирующим устройством, как в роботах первого поколения, а требует для своей реализации управляющей ЭВМ. Именно очувствление в сочетании с достаточно совершенным и разнообразным программным обеспечением управляющей ЭВМ позволяют» роботам второго поколения работать с неориентированными предметами произвольной формы, осуществлять сборку и монтаж конструкций по чертежу, взаимодействовать с внешней средой, выполнять требуемую (программную) последовательность операций в меняющейся обстановке. Таким образом, очувствление роботов является необходимой предпосылкой для повышения их функциональных возможностей.
Информационно-измерительная система очувствленных роботов, т. е. система их органов чувств, состоит из сенсорных датчиков внешней и внутренней информации. Соотношение между датчиками информации и их взаимодействие у этих роботов существенно другие, чем у программных роботов. Важно отметить, что для очувствленных роботов значительную роль играют датчики внешней информации, предназначенные для восприятия, анализа, распознавания и контроля состояний внешней среды. В качестве датчиков внутренней информации могут, в частности, использоваться датчики, применяемые в роботах первого поколения.
Каковы же требования, предъявляемые к датчикам внешней информации? Какова конструкция и основные характеристики этих датчиков?
В зависимости от назначения очувствленного робота его датчики внешней информации должны имитировать осязание, зрение, слух и т. п. Кроме того, могут потребоваться датчики для измерения радиоактивности, давления, влажности, температуры и других физических величин. Эти датчики должны обладать высокой точностью, надежностью, быстродействием, а также иметь малые габариты, вес и стоимость.
Надо отметить, что сейчас техника располагает датчиками и приборами, которые во много раз чувствительнее наших органов чувств. Микрофон слышит лучше, чем человеческое ухо, фотоэлемент видит большую часть спектра лучше, чем глаз. Сейсмограф более чувствителен, чем наши органы осязания, и, конечно, температуру по сравнению с термометром человек определяет совсем плохо.
Пожалуй, только одно чувство — обоняние, т. е. обнаружение и определение небольших количеств примесей органического вещества, у человека и животного более совершенно, чем у существующих приборов. В этой связи интересно напомнить, что органы обоняния — одни из самых сложных органов чувств, а природа явления, на основе которого они функционируют, до сих пор не открыта. Поэтому «догнать обоняние собаки» — одна из актуальных проблем очувствления роботов.
Опыт изучения органов чувств человека и животных содержит много сведений, которые могут быть использованы в качестве предпосылок для разработки искусственных органов чувств. В живых системах все органы чувств оснащены собственными органами движения, которые в свою очередь богато снабжены кинестетическими рецепторами. При восприятии существенная роль принадлежит как отдельным рецепторам, так и рецептивным полям и локальным детекторам, позволяющим выделять определенные простейшие признаки объектов. При анализе среды и внутреннего состояния важную роль играет совместная координированная обработка сенсорных сигналов различных типов с учетом производимых действий.
Взаимодействие человека с внешней средой в значительной степени основано на переработке зрительной, звуковой и тактильно-кинестетической информации. Существуют также ситуации, когда только тактильные и кинестетические ощущения способны дать правильную информацию о характеристиках среды. Эти ситуации возникают, например, тогда, когда необходимо осуществлять микродвижения пальцев для определения формы и качества поверхности окружающих предметов, а также в тех случаях, когда имеются помехи зрительному контролю.
Рассмотрим более подробно некоторые типы искусственных органов чувств, предназначенных для измерения характеристик внешней среды.
Тактильные и кинестетические датчики. Решение многих задач, связанных с поиском предметов, их захватом и манипулированием ими, стало возможным только с разработкой датчиков, обладающих тактильной и кинестетической чувствительностью. Простейшим типом таких датчиков являются контактные датчики. Они представляют собой микропереключатели, фиксирующие соприкосновение с предметом.
Тактильные датчики позволяют реагировать на прикосновение и измерять давление в местах соприкосновения (контакта) датчика с предметом. Они обычно размещаются на бамперах транспортных роботов или на схвате манипуляционных роботов. Эти датчики служат для обнаружения отдельных предметов, предотвращения повреждений этих предметов и самого робота, а также для распознавания внешней обстановки путем соприкосновения и ощупывания.
Кинестетические датчики регистрируют положение, перемещение исполнительных органов (например, пальцев захвата манипулятора) и возникающие в них усилия.
Важной особенностью тактильных и кинестетических датчиков является их способность работать практически в любой среде. В частности, эти датчики незаменимы для подводных роботов, так как при замутнении воды перестает работать телевизионный или оптический канал обратной связи.
Зрительные датчики. Для автоматического восприятия и анализа объемных (трехмерных) сцен необходима специальная аппаратура, которая по существу должна имитировать в функциональном отношении работу глаз. Она должна обеспечивать решение таких задач, как активный поиск объектов путем изменения ориентации зрительного датчика, автоматическая фокусировка изображения, измерение дальности до предметов, настройка чувствительности датчика в зависимости от изменения условий освещенности, выделение признаков изображения (цвет, текстура, контуры, размеры, форма и т. п.).
При зрительном очувствлении роботов источником информации служат телевизионные и оптические датчики. Телевизионный датчик («телеглаз») представляет собой телевизионную камеру с тем или иным законом развертки, в процессе которой все изображение или его фрагмент фиксируется в памяти в виде двухмерной матрицы распределения яркости оптической проекции реальной объемной сцены. В супервизорном режиме управления роботом обычно предусматривается возможность целеуказания, например, путем прикосновения «световым пером» к соответствующему месту экрана дисплея, на котором высвечиваются телекадры поля зрения. Однако телевизионное изображение является плоским, в отличие от самих предметов, которые, конечно, имеют три измерения. Это лишает человека и робота объемности восприятия и связанного с ним «эффекта присутствия». Поэтому большое значение для очувствления роботов приобретают средства голографии, которые позволяют записывать и восстанавливать не двухмерное распределение яркости, а световую волну, исходящую от предмета, со всеми ее подробностями. Для определения цвета предметов в роботах используются фотоэлементы, фотодиоды, светофильтры, световоды и другие элементы вместе с источниками света. Обнаружение и определение положения предмета с помощью оптических датчиков основано на регистрации сигналов при пересечении предметом светового потока.
Ведутся исследования по созданию сканирующих лазерных дальномеров, голографического телевидения и т. п. Основным недостатком зрительных датчиков является их непригодность при отсутствии источников света или в условиях с сильным рассеянием или поглощением света, например, под водой или в космическом пространстве.
Звуковые датчики. К звуковым датчикам относятся разного рода микрофоны и ультразвуковые датчики. Микрофоны служат для восприятия звуковых команд при голосовом управлении роботом. Ультразвуковые датчики состоят из передатчика и приемника сигналов. С помощью отраженного от предметов ультразвукового сигнала они могут их обнаруживать и определять расстояние до них.
Ультразвуковые датчики имеют по сравнению с оптическими следующие преимущества: они могут обнаруживать прозрачные объекты; их показания не зависят от условий освещения и малочувствительны к изменению физических свойств среды (пыль, пар, жидкая среда); срок службы генераторов колебаний практически неограничен и т. д. Однако ввиду нечеткой направленности ультразвуковых колебаний точность определения расстояний до предметов у таких датчиков невысока. Кроме того, они не способны обнаруживать объекты с очень малыми габаритами, что связано с относительно большой длиной ультразвуковых волн.
Помимо описанных датчиков, очувствленные роботы снабжаются по мере необходимости и другими: магнитометрами, температурными датчиками и т. д.
Источник
Датчики это органы чувств
7. Осязание роботов
Создание по – настоящему разумного робота невозможно без датчиков, подобных органам чувств человека. О состоянии собственного тела мы можем судить и с закрытыми глазами – от нервных центров в мозт передаётся вся нужная информация. Системой «очувствления» должны обладать и самоуправляемые роботы. Англизируя информацию о состоянии внешней среды и своём собственном, ЭВМ принимает решение о составе и последовательности действий.
Первым чувством, которому «научили» роботов, было осязание. Датчики давления, температуры, влажности, встроенные в пальцы руки, позволяют роботу определять, есть ли рядом нужный предмет, каковы его размеры, форма, температура поверхности. Осязательными (тактильными) датчиками оснащены роботы третьего поколения. Движущиеся, ходячие роботы оповещаются о приближении к препятствию специальными антеннами.
Роботы, которые предназначены для сборки, должны уметь распознавать отдельные детали. В последнее время появилась возможность создания искусственных органов осязания, заменяющих пальцы рук человека. В качестве искусственных, ощупывающих окружающие предметы органов осязания используются ёмкостные, индукционные, температурные, радиоактивные и ультразвуковые щупы – датчики, которые способны превращать воздействия, получаемые ими от ощупываемого предмета, в определённые электрические сигналы.
Среди наиболее простых и наиболее распространённых датчиков внешней информации можно отметить так называемые контактные датчики. На концах схвата – руки робота устанавливают специальные выключатели, которые фиксируют факт прикосновения к детали или станку и посылают импульс в мозг робота. Десяток таких выключателей, расположенных не только внутри пальцев схвата, но и на наружной его поверхности (сверху, снизу, справа и слева), помогают роботу «на ощупь» определить положение детали или возникшего препятствия.
Однако человек, манипулируя предметом, фиксирует не только факт соприкосновения, но и ощущает давление руки на предмет через кожу и таким образом может регулировать усилие сжатия соответственно массе и прочности предмета. Такой датчик представляет собой, например, слой электропроводящего вспененного полиуретана, заключённого между тонкими металлическими пластинками. В зависимости от давления расстояние между пластинами меняется. Соответственно изменяется электрическое сопротивление цепи. Эти свойства искусственной чувствительной кожи уже используют при протезировании.
В качестве весьма грубого примера конструкции схвата манипулятора, ощущающего предметы, рассмотрим устройство манипулятора Эрнста (рис. 56), собранного им в конце 1961 года. Манипулятор оснащён двумя группами датчиков. Одну образуют датчики, установленные во всех подвижных сочленениях. Они посылают информацию о том, как механизм выполняет сигналы, управляющие движением всех сочленений руки. Это датчики внутренней обратной связи. Система непрерывно сравнивает те положения руки, которые задаёт управляющая машина, с положениями, которые рука занимает в действительности, и в соответствии с результатами этого сравнения ЭЦВМ непрерывно генерирует сигналы управления, устраняющие рассогласование, заставляя механическую руку занимать нужные положения и нужным образом менять их.
Вторая группа датчиков установлена на схвате. Именно эти датчики связывают руку с внешним миром. Схват, как обычно состоит из двух пальцев. Верхняя, нижняя и передняя плоскости каждого пальца оснащены контактными датчиками, работающими в двоичном коде: включён – выключен. Эти датчики сигнализируют о том, что рука наткнулась на объект нерабочим участком. На внутренней и рабочей передней плоскостях каждого пальца расположено ещё по восемь датчиков. Они работают уже не в двоичном коде, а генерируют сигналы, уровень которых пропорционален силе нажатия на датчик. Шесть из них расположены на рабочих плоскостях схвата и информируют о том, какие части плоскостей участвуют в схвате и с какой силой пальцы сжимают объект.
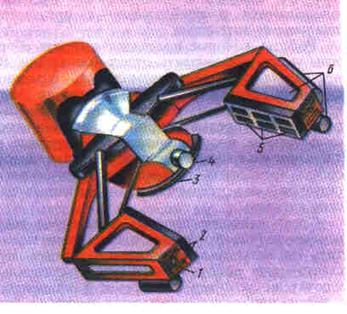
Рис. 56. Манипулятор Эрнста: 1 – датчик, определяющий положение объекта между пальцами схвата; 2 – датчик сигнализации соприкосновения с нерабочими участками пальцев; 3 – датчик, сигнализирующий о расположении схватываемого объекта; 4 – фотодиод, реагирующий на тень объекта; 5 – датчики, сигнализирующие о соприкосновении с объектом; 6 – датчик, включающийся при соприкосновении руки со столом
Два датчика, расположенные на передних плоскостях пальцев, регистрируют силу сопротивления движению схвата со стороны объекта. В случае, если рука с ним сталкивается в процессе движения, эти датчики позволяют получить информацию о протяжённости и размерах этого объекта.
Таким образом, схват – его рабочие и нерабочие поверхности – снабжён подобием осязания и очувствлен по силе сжатия. Кроме того, на передних поверхностях пальцев между датчиками осязания помещено по глазу – фотодиоду, реагирующему на затенение: когда рука приближается к какому – либо объекту, но ещё не коснулась его, в машину поступает сигнал о приближении и о необходимости снизить скорость перемещения. ЭЦВМ принимает, обрабатывает и использует принятую информацию при реализации заданной программы.
Манипулятор Эрнста работает как робот с «завязанными глазами». Датчики, которыми он оснащён, собирают информацию вслепую – осязанием, «на ощупь». Он не может отделить процесс сбора информации от процесса движения, сначала получить представление о ситуации, сложившейся во внешнем мире, и только затем начать действовать. Именно поэтому он вынужден искать их один за другим. А настоящий робот должен иметь такие органы чувств, которые дали бы ему возможность предпослать движению сбор информации.
Конструирование сенсорных устройств
Как мы уже говорили, неотъемлемой частью систем осязания роботов являются сенсорные устройства, вызывающие срабатывание механизмов ориентации и захвата предметов. Контактное управление все чаще находит сейчас применение в разных областях. В обыденной жизни можно встретиться с этим способом управления в лифте. В современных лифтах вместо обычных кнопок устанавливаются на панели сенсорные контакты – неподвижные металлические пластины, при прикосновении к которым приходит в действие механизм лифта.
Что это за система управления, как она работает и каковы её преимущества? Сенсорное управление имеет одно преимущество – в нём нет электрических контактов – одного из самых ненадёжных звеньев электронной аппаратуры. Именно благодаря этому бесконтактное управление нашло широкое распространение. В частности, сенсорными переключателями каналов оснащены многие современные телевизоры.
Как работает система сенсорного управления? Различают два способа воздействия: ёмкостное и резистивное.
Тело человека имеет определённую довольно большую ёмкость (рис. 57) относительно окружающих проводящих предметов. Поэтому, когда человек прикасается к металлической пластине – сенсорному контакту (или короче – сенсору), резко изменяется ёмкость, приведённая к входу аппарата. На этом основана работа ёмкостного сенсора.
В резистивном сенсоре использовано сопротивление покрова пальца (рис. 58). В этом случае сенсор состоит из двух изолированных металлических пластин, которые замыкают пальцем при прикосновении.
Самая простая система сенсорного управления подобного рода может выглядеть так, как представлено на рис. 59. В исходном состоянии, т. е. тогда, когда мы не касаемся сенсора Е1 пальцем, через транзистор VT1 течёт очень слабый ток, поэтому напряжение на его коллекторе равно напряжению питания (на резисторе R1 почти нет падения напряжения). Прикосновение пальца к обеим частям сенсора равнозначно включению резистора между источником питания и базой транзистора. Таким образом, появляется базовый ток, что вызовет увеличение тока через цепь коллектора и включённый там резистор. При этом напряжение на коллекторе немедленно уменьшится – на выходе сформируется так называемый перепад напряжения. Если убрать палец с сенсора, напряжение на выходе восстановится. Таким простым способом – прикосновением пальца к сенсору – мы вызываем образование импульсов напряжения на выходе устройства.
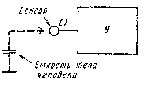
Рис. 57. Ёмкостный сенсор
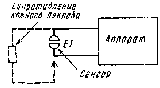
Рис. 58. Резистивнъш сенсор
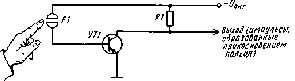
Рис. 59. Система контактного управления
Зная, как образуются управляющие электрические импульсы, можно сравнительно просто собирать различные устройства, выполняющие те или иные задачи. Так на рис. 60, а представлена структурная схема узла управления освещением. Мы видим здесь три основных составных элемента: сенсор Е1, усилитель сигнала, электронный переключатель – триггер, усилитель постоянного тока и его нагрузка – её роль играет лампа накаливания HL1. Принципиальная схема устройства показана на рис. 60,6. Электрические импульсы с выхода усилителя на транзисторе VT1 переключают триггер, собранный на транзисторах VT2, VT3. Триггер переходит из одного устойчивого состояния в другое, когда открыт то один из его транзисторов, то другой.
Когда открыт транзистор VT3, то закрыт транзистор VT4 усилителя тока и лампа не горит. Она загорается при закрывании транзистора. В устройстве использована лампа на напряжение 6 В и ток 0,1 А.
В устройстве можно применить любые германиевые транзисторы малой мощности. Германиевые диоды – тоже любые. Важно лишь, чтобы в триггере были однотипные транзисторы и однотипные диоды. Источник питания – две батареи 3336, соединённые последовательно.
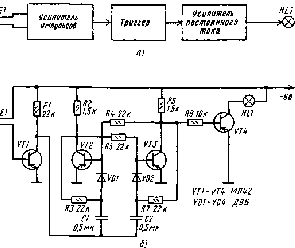
Рис. 60. Сенсорная система управления освещением: а) монтажная схема, б) структурная схема
После того как устройство будет смакетировано и проверено, его можно установить в корпус настольной лампы. На рис. 61 показано примерное размещение отдельных узлов и деталей в корпусе лампы. Сенсорный выключатель. Этим устройством можно заменить выключатели электроосветительных приборов, телевизора, радиоприёмника. Многие уже, наверное, сталкивались с таким явлением: если прикоснуться пальцем к тока. Вот этим, казалось бы, вредным эффектом можно воспользоваться, собрав сенсорное устройство, схема которого приведена на рис. 62. Если прикоснёмся пальцем к сенсорному контакту Е1, через конденсатор С1 к затвору полевого транзистора VT1 (в исходном состоянии он открыт) будет приложено небольшое переменное напряжение. Ступень на транзисторе VT1 представляет собой усилитель – ограничитель.
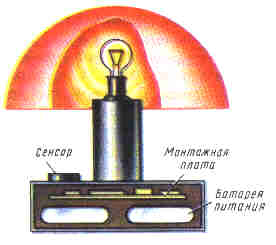
Рис. 61. Сенсорное устройство управления ночным освещением
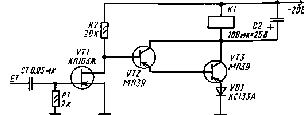
Рис. 62. Транзисторное сенсорное устройство
Усилитель постоянного тока на транзисторах VT2 и VT3 необходим для усиления сигнала по мощности до уровня, достаточного для срабатывания реле К1. Контакты этого реле коммутируют исполнительные цепи. Конденсатор С2, которым зашунтировано реле, сглаживает пульсации, напряжения на обмотке. Стабилитрон в цепи эмиттера выходного транзистора обеспечивает помехоустойчивость устройства.
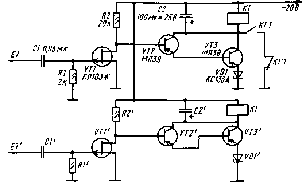
Рис. 63. Сенсорный выключатель
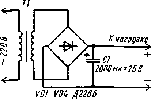
Рис. 64 Схема блока питания
На рис. 63 приведена схема ещё одного варианта сенсорного выключателя, способного включать и выключать бытовые приборы. Он состоит из двух ячеек, подобных описанной выше. В момент прикосновения к сенсору Е1 срабатывает реле К1. Контактами К1.2 (на схеме не показаны) оно включает исполнительную цепь и самоблокируется через контакты К 1.1 и К ГЛ. Для отключения прибора от сети достаточно прикоснуться пальцем к сенсору Е1. Срабатывает реле КГ, цепь самоблокировки разрывается, и реле К1 возвращается в исходное состояние. Для этих сенсорных устройств можно сделать простейший блок питания. Его схему вы видите на рис. 64.
Во всех устройствах могут быть применены следующие реле: РСМ2 (паспорт Ю.171.81.56), РЭС22 (РФ4.500.129), РЭС22 (РФ4.500.131). Помимо этого, везде, кроме первой ячейки переключателя, могут быть использованы реле: РЭС10 (РС4.524.303), РЭС15 (РС4.591.003), РЭС15 (РС4.591.004) с одной группой контактов.
В качестве сетевого трансформатора Т1 блока питания использован выходной трансформатор кадровой развёртки ТВК 110ЛМ от телевизора. Этот трансформатор имеет три обмотки (1 – 2400 витков провода ПЭВ – 1 0,14). Переделка трансформатора заключается в том, что к обмотке II следует добавить ещё 30 витков, намотанных тем же проводом. Обмотку III можно удалить. Если же вам удастся достать реле РЭС22 (паспорт РФ4.500.129), трансформатор можно не переделывать.
Источник